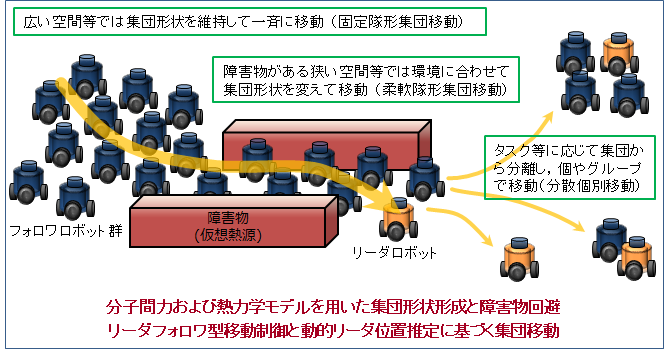
ロボットを分子に見立て、分子間力と熱力学モデルを応用した仮想的な引斥力に基づき集団中の各ロボットの移動を制御し、群ロボットの集団移動を行います。移動環境中の障害物を仮想熱源とし、 熱伝搬による固相・液相・気相の相転移を模すことで、各ロボット間距離が一定の固定隊形集団移動、環境形状に沿って集団形状を変更可能な柔軟隊形集団移動,集団から分離して個々に移動する分散個別移動を一つのモデルで表します。
東京電機大学 工学部 情報通信工学科 ネットワークロボティクス研究室
ロボットを分子に見立て、分子間力と熱力学モデルを応用した仮想的な引斥力に基づき集団中の各ロボットの移動を制御し、群ロボットの集団移動を行います。移動環境中の障害物を仮想熱源とし、 熱伝搬による固相・液相・気相の相転移を模すことで、各ロボット間距離が一定の固定隊形集団移動、環境形状に沿って集団形状を変更可能な柔軟隊形集団移動,集団から分離して個々に移動する分散個別移動を一つのモデルで表します。